08.04.48 Salto-1P - одноногий стрибучий робот | |
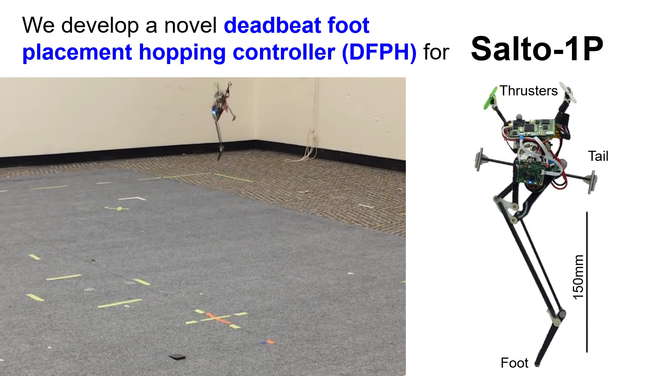 Американські інженери з Каліфорнійського університету в Берклі розробили одноногого робота Salto-1P, який здатний точно планувати точку приземлення, а також ефектно заплигувати на нерівні або недавно пересунути поверхні.
Як повідомляється, за своєю конструкцією Salto-1P є підпружинений зворотний маятник, який використовує для стрибків відразу кілька механізмів: мотор, що приводить в дію ногу, що складається з декількох сегментів, а також механічний аналог хвоста і два гвинти, що компенсують обертання робота. Експерименти показали, що стандартне відхилення помилки становить 10 см, а 95% стрибків закінчуються не далі, ніж в 30 сантиметрах від запланованої точки приземлення. Завдяки цьому робот може заплигувати навіть на невеликі і нерівні перешкоди, наприклад, на стілець із зігнутим сидінням. Крім цього, Salto-1P здатний швидко адаптуватися до зміщення мети. Для цього він використовує зовнішню систему захоплення рухів. Так, робот може «потрапити» в ціль, нанесену на дошку, навіть якщо її рухають незадовго до стрибка. Джерело: N+1 | |
|
| |
| Всього коментарів: 0 | |