11.21.46 Двоногий робот Cassie навчився набивати м'ячик | |
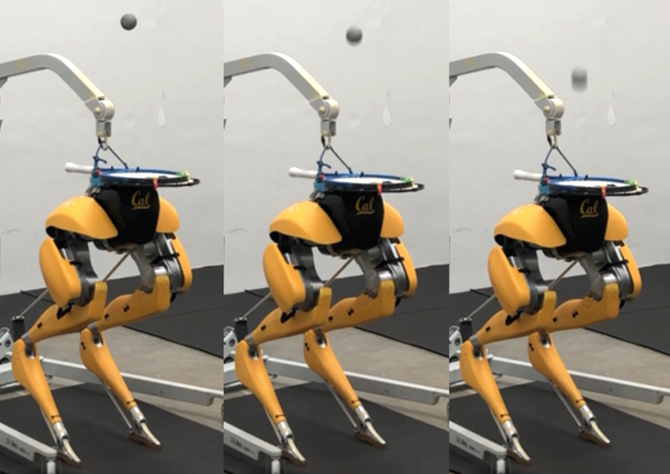 Двоногого робота Cassie навчили набивати м'ячик, одночасно з цим підтримуючи баланс. В майбутньому подібний навик може допомогти при вирішенні прикладних задач, що вимагають виконання відразу декількох динамічних дій, а також для навчання робота контактної і пост-контактної фізики об'єктів, розповіли інженери в інтерв'ю IEEE Spectrum.
Відзначимо, що, хоча ходячі роботи мають переваги перед колісними, їх конструкція і алгоритми управління влаштовані набагато складніше. Це обумовлено тим, що такі роботи нестабільні і їм постійно доводиться підтримувати баланс, відстежуючи своє становище і ретельно розраховуючи майбутній рух. При цьому якщо розробники створюють робота з руками, здатного виконувати з їх допомогою будь-які завдання, управління стає ще більш складним, оскільки асинхронні рухи рук і ніг доводиться погоджувати, щоб робот не впав. Надалі інженери мають намір навчити робота набивати м'яч не тільки без зовнішньої системи захоплення рухів, але і під час ходьби, а також одночасно управлятися з кількома м'ячами і ловити м'ячик, що кидається людиною. Передбачається, що в майбутньому ці навички знадобляться при створенні робота, здатного, в числі іншого, оцінювати поведінку предметів після фізичного контакту - наприклад, такий робот буде готовий до того, що предмет, який йому необхідно зловити, може відскочити від рук або таці, а крім того, щоб розчистити місце на столі, пристрій зможе посунути одним рухом руки відразу кілька предметів замість того, щоб вручну переставляти кожен з них. Джерело: N+1 | |
|
| |
| Всього коментарів: 0 | |